A közelmúltban jelent meg egy hír a HVG-ben egy német robotfejlesztési újdonságról. A polipkarú kísérleti robot egyik fő erénye a biztonság – biztonságosan használható emberek mellett is. A kollaboratív robotokkal szinte minden gyártó el kezdett foglalkozni, s Magyarországon is igyekeznek a cégek hozzátenni tudásukat a kollaboratív robotok hatékony felhasználásához.
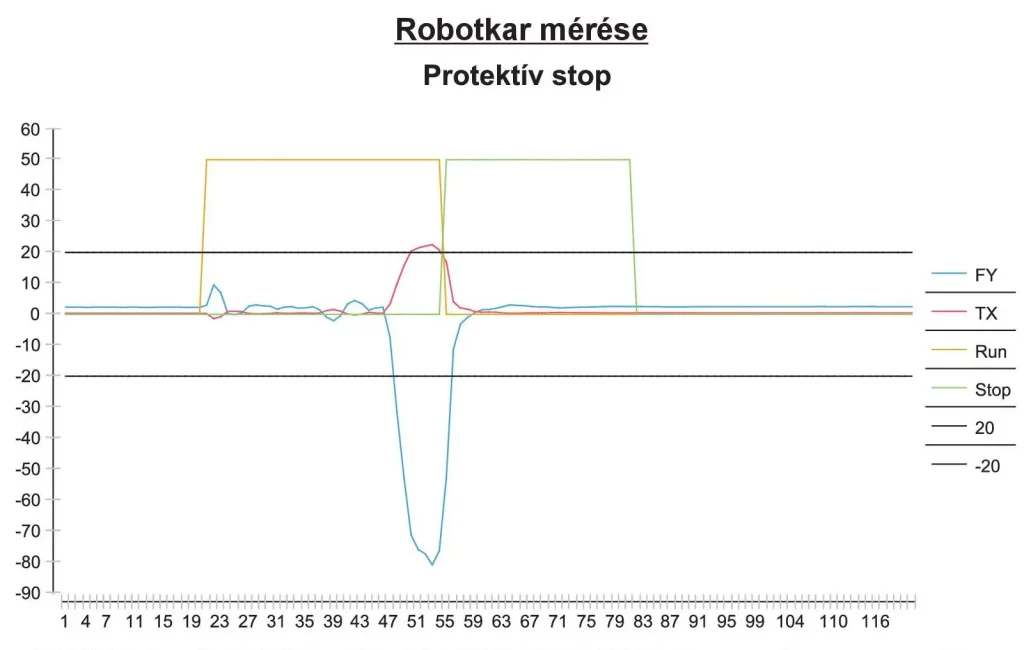
A kollaboratív tulajdonság alapja, hogy a robot „érzi” ha ütközik, az adott, beállítható erő felett megállítja a robotot, biztosítva ezzel, hogy ne okozzon sérülést. A robot-működés optimalizálásához többek között a nagymennyiségű működési adat valósidejű elemzésén át vezet az út. A Seacon Kft. elemző szoftverét (http://industry4.hu/hu/i4log) legutóbb a Construma kiállításon szemlélhette meg a nagyközönség is, ahol pl. a valósidejű vizsgálódásra alapozva nem csak a „robot-egészségügyi” állapotok követhetők nyomon (karbantartás tervezés), hanem pl. a fellépő kritikus erők, a veszélyhelyzetek jóval azelőtt detektálhatóak illetve elemezhetőek, mielőtt az egyébként kollaboratív robot a veszélyes erőket mérve védelmi-stop állapotba kerülne.